Codzienna praca dyspozytora plus współpraca z systemami które już masz w obiekcie. Bez modułów do dokupienia, bez ukrytych warstw licencyjnych.
Daily dispatcher work plus interoperability with the systems already deployed at your site. No add-on modules, no hidden licence tiers.
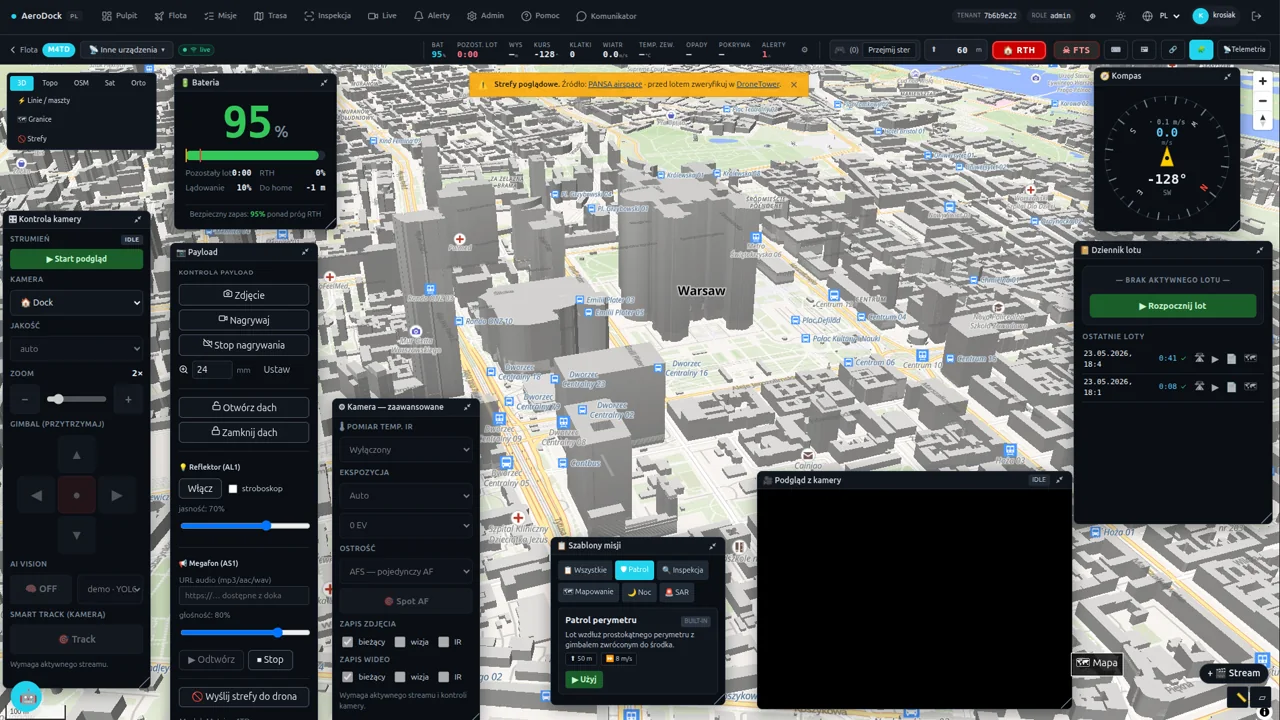
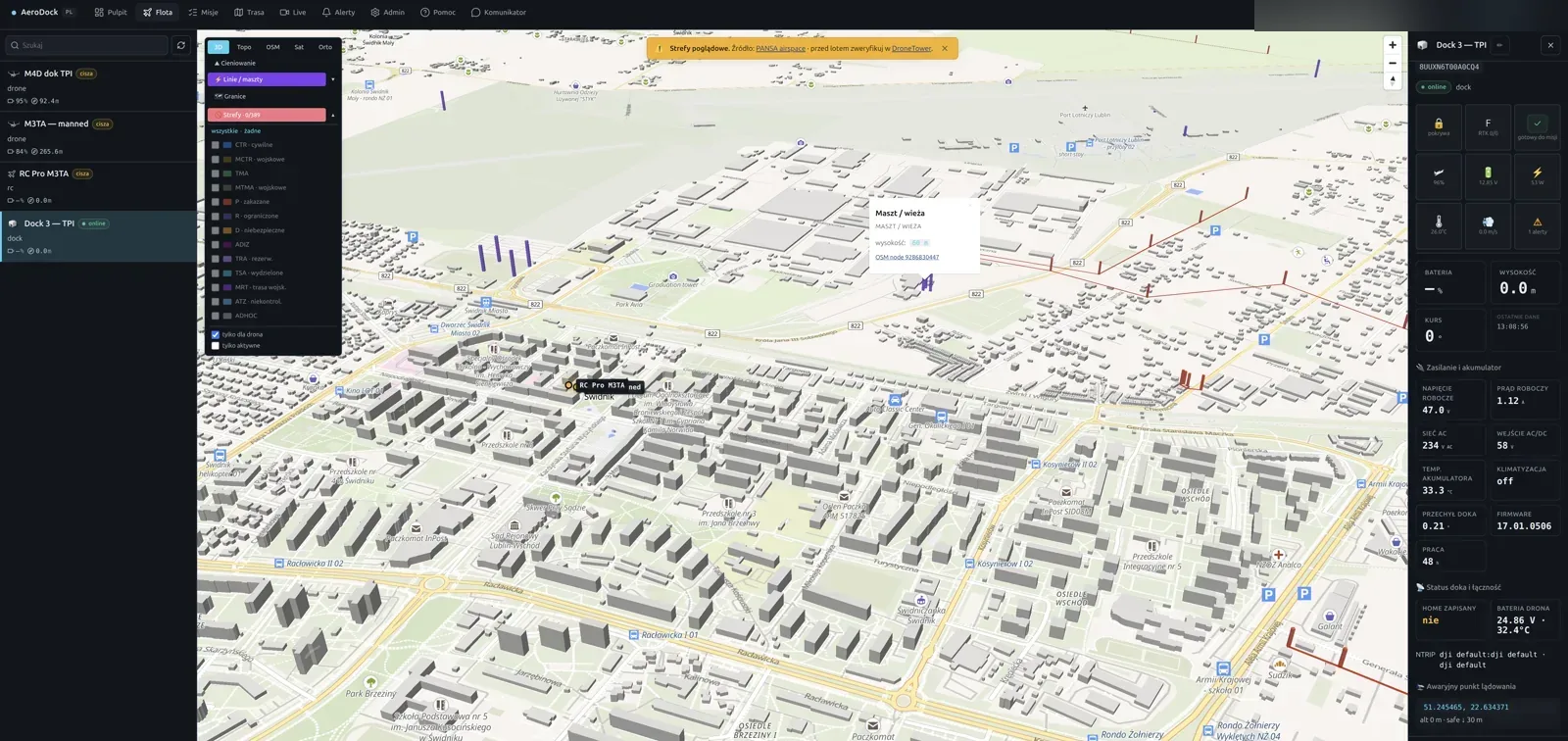
Pulpit w czasie rzeczywistym
Real-time console
Mapa z położeniem każdego drona i hangaru, telemetria, stan baterii, status ładowania, alerty zdrowia urządzeń. Wszystko w przeglądarce, bez instalowania aplikacji.
Map with every drone and hangar, telemetry, battery, charging status, device-health alerts. All in the browser — nothing to install.
Obraz na żywo z drona
Live drone video
Strumień wideo bezpośrednio w przeglądarce, jednocześnie dla wielu obserwatorów. Nagrywanie z metadanymi czasu i położenia, gotowe do archiwum jako dowód.
Drone video stream straight in the browser, simultaneously for multiple watchers. Recording with time and position metadata, evidence-grade out of the box.
Plan lotu, szablony, sprawdzanie kolizji
Mission planner with collision check
Klikasz punkty na mapie (3D z budynkami) — system buduje trasę i wykonuje ją według harmonogramu cron. Każda trasa przed wysyłką sprawdzana pod kątem kolizji z budynkami OSM, liniami WN, masztami (wysokość pylonów inferowana z napięcia 110/220/400 kV) oraz przekroczeń stref CTR. Szablony misji (Save as template), wsadowe wysyłanie wielu draftów sekwencyjnie, gotowy katalog: perymetr, orbita POI, inspekcja liniowa, top-down, mapping, mission-from-images (XMP).
Click points on a 3D map with buildings — the system builds a route and runs it on a cron schedule. Every route is pre-checked against OSM buildings, HV power lines, towers (pylon height inferred from voltage 110/220/400 kV) and CTR airspace breaches. Mission templates (Save as template), batch dispatch of multiple drafts sequentially, built-in catalog: perimeter, POI orbit, linear inspection, top-down, mapping, mission-from-images (XMP).
Zdalne sterowanie
Remote control
W razie potrzeby dyspozytor przejmuje sterowanie z przeglądarki — kontrola lotu, obrotu kamery, zatrzymanie awaryjne. Wszystko jednym kliknięciem, bez fizycznego pilota. Opcjonalnie pad PS5/Xbox podpięty po Bluetooth (WebGamepad) — bez instalacji sterowników.
When needed, the dispatcher takes manual control from the browser — flight, camera gimbal, emergency stop. One click, no physical controller. Optional PS5/Xbox gamepad over Bluetooth (WebGamepad API) — no driver install.
Współpraca z systemem monitoringu wizyjnego
Video-monitoring integration
Obraz z drona pojawia się w istniejącym systemie monitoringu klienta — bez zmian po stronie centrum dozoru. Operator widzi drona obok kamer stacjonarnych, w tym samym oknie podglądu.
The drone feed appears in the customer's existing video-monitoring system — no changes on the control-room side. The operator sees the drone next to fixed cameras in the same viewing window.
Współpraca z systemem alarmowym
Alarm system integration
Zdarzenie z centrali alarmowej — włamanie, naruszenie strefy, pożar — automatycznie wyzwala lot drona w stronę punktu zagrożenia. Bez ręcznego przekierowania, bez opóźnień.
An event from the alarm panel — intrusion, perimeter breach, fire — automatically launches a drone toward the incident point. No manual rerouting, no delays.
Powiadomienia i raporty
Notifications & reports
Powiadomienia SMS i e-mail oraz przez komunikatory zespołowe. Po każdej misji gotowy raport PDF: trasa, statystyki (max wysokość, prędkość, dystans), zdjęcia kluczowych punktów, alerty HMS w okresie lotu, pole podpisu pilota i kierownika — bezpośrednio do archiwum lub do prokuratury jako materiał dowodowy.
SMS and email notifications, plus team-chat messages. After each mission a ready PDF report: route, statistics (peak altitude, speed, distance), key-point photos, HMS alerts within the flight window, pilot & supervisor signature lines — straight to the archive or to authorities as evidence.
Eksport zdarzeń
Event export
Wszystkie zdarzenia — loty, alarmy, interwencje dyspozytora — przekazywane do nadrzędnych systemów bezpieczeństwa klienta i systemów zarządzania budynkiem. Bez dodatkowych modułów, bez własnych adapterów.
All events — flights, alarms, dispatcher actions — forwarded to the customer's higher-level security and building-management systems. No add-on modules, no custom adapters.
Sztuczna inteligencja w czasie rzeczywistym
Real-time AI vision
Wykrywanie osób, pojazdów i zwierząt w obrazie z drona przez sieć YOLO uruchomioną na GPU NVIDIA. Cztery tryby pracy: demo, ochrona (auto-alert), zliczanie, detekcja anomalii. Bounding box'y nakładane na obraz w czasie rzeczywistym, ~30 ms na klatkę.
Person, vehicle and animal detection in the drone feed via YOLO running on NVIDIA GPU. Four modes: demo, security (auto-alert), counting, anomaly detection. Bounding boxes overlaid on live video, ~30 ms per frame.
Komunikator operatorów
Operator communicator
Bezpieczna komunikacja video+audio między dyspozytorami różnych obiektów. Push-to-talk (PTT) jak w klasycznym systemie dyspozytorskim — przytrzymujesz Spację, mówisz, puszczasz. Cała komunikacja przez polski LiveKit SFU, bez zewnętrznych chmur.
Secure video + audio link between dispatchers of different sites. Push-to-talk (PTT) like a classic dispatcher console — hold Space, speak, release. Routed through a Polish LiveKit SFU instance, no third-party clouds.
Wielopoziomowe uprawnienia (RBAC)
Multi-tier access control (RBAC)
Sześciopoziomowy model dostępu: od obserwatora historycznego (reviewer) po administratora. Każda akcja operatora rejestrowana w niezmienialnym dzienniku audytowym — wymóg każdej polityki SZBI i zewnętrznego pentestu.
Six-tier permission model: from historical reviewer to full admin. Every operator action recorded in an append-only audit log — required by every ISMS policy and external pentest.